Find the line incident on these points in the
projective plane.
Find the point incident on both of
these projective lines.
Answer
This determinant
shows that the line is .
Problem 3
Find the formula for the line incident on two projective points.
Find the formula for the point incident on two projective lines.
Answer
The line incident on
can be found from this determinant equation.
The equation for the point incident on two lines is the same.
Problem 4
Prove that the definition of incidence is independent of the choice of
the representatives of and .
That is, if , , , and , , are two triples of
homogeneous coordinates for , and
, , , and , , are two triples of
homogeneous coordinates for , prove that
if and only if
.
Answer
If , , , and , , are two triples of
homogeneous coordinates for then the two column vectors
are in proportion, that is, lie on the same line through the
origin.
Similarly, the two row vectors are in proportion.
Then multiplying gives the answer .
Problem 5
Give a drawing to show that central projection does not preserve
circles, that a circle may project to an ellipse.
Can a (non-circular) ellipse project to a circle?
Answer
The picture of the solar eclipse — unless
the image plane is exactly perpendicular
to the line from the sun through the pinhole — shows the circle
of the sun projecting to an image that is an ellipse.
(Another example is that in many pictures in this
Topic, the circle that is the sphere's equator is drawn as an ellipse,
that is, is seen by a viewer of the drawing as an ellipse.)
The solar eclipse picture also shows the converse. If we picture the projection as going from left to right through the pinhole then the ellipse projects through to a circle .
Problem 6
Give the formula for the correspondence between the
non-equatorial part of the antipodal modal
of the projective plane, and the plane .
Answer
A spot on the unit sphere
is non-equatorial if and only if .
In that case it corresponds to this point on the plane
since that is intersection of the line containing the vector and the plane.
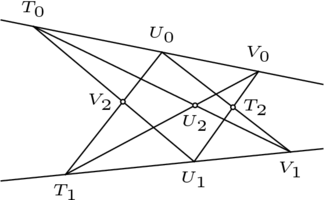
Problem 7
(Pappus's Theorem)
Assume that , , and are collinear and that
, , and are collinear.
Consider these three points:
(i) the intersection of the lines and ,
(ii) the intersection of the lines and , and
(iii) the intersection of and .
Draw a (Euclidean) picture.
Apply the lemma used in Desargue's Theorem
to get simple homogeneous coordinate vectors for the
's and .
Find the resulting homogeneous coordinate vectors
for 's (these must each involve a parameter as, e.g., could
be anywhere on the line).
Find the resulting homogeneous coordinate vectors for
.
(Hint: it involves two parameters.)
Find the resulting homogeneous coordinate vectors for
.
(It also involves two parameters.)
Show that the product of the three parameters is .
Verify that is on the line..
Answer
Other pictures are possible, but this is one.
The intersections
, , and
are labeled so that on each line is a , a , and a .
The lemma used in Desargue's Theorem gives a
basis with respect to which the points have these
homogeneous coordinate vectors.
First, any on
has homogeneous coordinate vectors of this form
( is a parameter; it depends on where on the line
the point is, but any point on that line has
a homogeneous coordinate vector of this form for some ).
Similarly, is on
and so has this homogeneous coordinate vector.
Also similarly, is incident on
and has this homogeneous coordinate vector.
Because is we have this.
Substituting for in the first equation
shows that has this
two-parameter homogeneous coordinate vector.
Since is the intersection
and substituting for in the first equation
gives that
has this two-parameter homogeneous coordinate vector.
Because is on the line its
homogeneous coordinate vector has the form
but a previous part of this question established that 's
homogeneous coordinate vectors have the form
and so this a homogeneous coordinate vector for .
By () and (), there is a
relationship among the three parameters: .
The homogeneous coordinate vector of can be written
in this way.
Now, the line consists of the points whose homogeneous
coordinates have this form.
Taking and shows that the
homogeneous coordinate vectors of have this form.