Let be the transformation that rotates
vectors clockwise by radians.
Find the matrix representing
with respect to the standard bases.
Use Gauss' method to reduce to the identity.
Translate the row reduction to to a matrix equation
(the prior item shows both that is similar to , and that
no column operations are needed to derive from ).
Solve this matrix equation for .
Sketch the geometric effect matrix, that is, sketch how
is expressed as a
combination of dilations, flips, skews, and projections
(the identity is a trivial projection).
Answer
To represent , recall that rotation counterclockwise by
radians is represented with respect to the standard basis
in this way.
A clockwise angle is the negative of a counterclockwise
one.
This Gauss-Jordan reduction
produces the identity matrix
so there is no need for column-swapping operations
to end with a partial-identity.
The reduction is expressed in matrix multiplication
as
(note that composition of the Gaussian operations is performed
from right to left).
Taking inverses
gives the desired factorization of (here, the partial
identity is , and is trivial, that is, it is also an identity
matrix).
Reading the composition from right to left (and ignoring the
identity matrices as trivial) gives that has the same
effect as first performing this skew
followed by a dilation that multiplies all first components by
(this is a "shrink" in that )
and all second components by ,
followed by another skew.
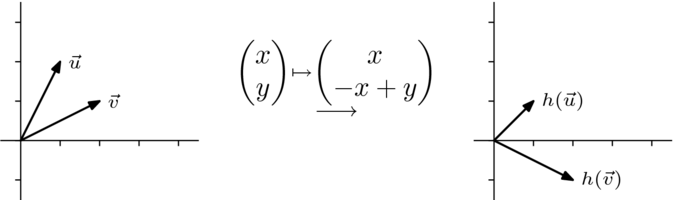
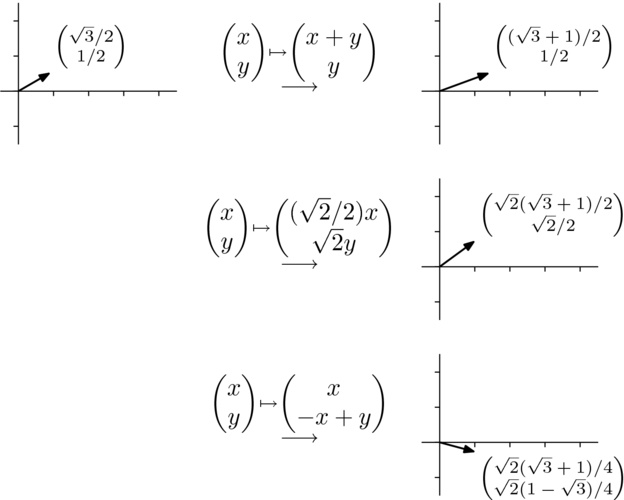
For instance, the effect of on the unit vector whose angle with
the -axis is is this.
Verifying that the resulting vector has unit length and forms an
angle of with the -axis is routine.
Problem 2
What combination of dilations, flips, skews, and projections
produces a rotation counterclockwise by radians?
Answer
We will first represent the map with a matrix ,
perform the row operations and, if needed, column operations
to reduce it to a partial-identity matrix.
We will then translate that into a factorization .
Subsitituting into the general matrix
gives this representation.
Gauss' method is routine.
That translates to a matrix equation in this way.
Taking inverses to solve for yields this factorization.
Problem 3
What combination of dilations, flips, skews, and projections
produces the map
represented with respect to the standard bases by this matrix?
Answer
This Gaussian reduction
gives the reduced echelon form of the matrix.
Now the two column operations of taking times the first column
and adding it to the second, and then of swapping columns two and three
produce this partial identity.
All of that translates into matrix terms as: where
and
the given matrix factors as .
Problem 4
Show that any linear transformation of is the map
that multiplies by a scalar .
Answer
Represent it with respect to the standard bases , then the only entry in the resulting matrix is the scalar .
Problem 5
Show that for any permutation
(that is, reordering) of the numbers
, ..., , the map
can be accomplished with a composition of maps,
each of which only swaps a single pair of coordinates.
Hint: it can be done by induction on .
(Remark: in the fourth chapter we will show this and we will also
show that the parity of the number of swaps used is determined by .
That is, although a particular
permutation could be accomplished in two different ways
with two different numbers of swaps, either both ways use an even number of
swaps, or both use an odd number.)
Answer
We can show this by induction on the number of components in the
vector.
In the base case the only permutation is the trivial one,
and the map
is indeed expressible as a composition of swaps— as zero swaps.
For the inductive step we assume that the map induced by
any permutation of fewer than
numbers can be expressed with swaps only, and we consider the map
induced by a
permutation of numbers.
Consider the number such that .
The map
will, when followed by the swap of the -th and -th components, give the map . Now, the inductive hypothesis gives that is achievable as a composition of swaps.
Problem 6
Show that linear maps preserve the linear structures of a space.
Show that for any linear map from to ,
the image of any line is a line.
The image may be a degenerate line, that is, a single point.
Show that the image of any linear surface is a linear surface.
This generalizes the result that under a linear map the image of
a subspace is a subspace.
Linear maps preserve other linear ideas.
Show that linear maps preserve "betweeness": if the point
is between and then the image of is between the
image of and the image of .
Answer
A line is a subset of of the form
.
The image of a point on that line is
,
and the set of such vectors, as ranges over the reals, is
a line (albeit, degenerate if ).
This is an obvious extension of the prior argument.
If the point is between the points and then the
line from to has in it.
That is, there is a such that
(where is the
endpoint of , etc.).
Now, as in the argument of the first item, linearity shows that
.
Problem 7
Use a picture like the one
that appears in the discussion of the Chain Rule
to answer: if a function has an inverse,
what's the relationship between how the function — locally,
approximately — dilates space, and
how its inverse dilates space (assuming, of course, that it has an
inverse)?
Answer
The two are inverse.
For instance, for a fixed ,
if (with ) then
.










![{\displaystyle {\xrightarrow[{}]{\rho _{1}+\rho _{2}}}{\begin{pmatrix}{\sqrt {2}}/2&{\sqrt {2}}/2\\0&{\sqrt {2}}\end{pmatrix}}{\xrightarrow[{(1/{\sqrt {2}})\rho _{2}}]{(2/{\sqrt {2}})\rho _{1}}}{\begin{pmatrix}1&1\\0&1\end{pmatrix}}{\xrightarrow[{}]{-\rho _{2}+\rho _{1}}}{\begin{pmatrix}1&0\\0&1\end{pmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/faae28eb7d6e867ffd9a39f73f6bcf2b569fbd03)
















![{\displaystyle {\xrightarrow[{}]{{\sqrt {3}}\rho _{1}+\rho _{2}}}{\begin{pmatrix}-1/2&-{\sqrt {3}}/2\\0&-2\end{pmatrix}}{\xrightarrow[{(-1/2)\rho _{2}}]{-2\rho _{1}}}{\begin{pmatrix}1&{\sqrt {3}}\\0&1\end{pmatrix}}{\xrightarrow[{}]{-{\sqrt {3}}\rho _{2}+\rho _{1}}}{\begin{pmatrix}1&0\\0&1\end{pmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/443d4da6f31b7426c5d7799df1864905b916611c)




![{\displaystyle {\xrightarrow[{-\rho _{1}+\rho _{3}}]{-3\rho _{1}+\rho _{2}}}{\begin{pmatrix}1&2&1\\0&0&-3\\0&0&1\end{pmatrix}}{\xrightarrow[{}]{(1/3)\rho _{2}+\rho _{3}}}{\begin{pmatrix}1&2&1\\0&0&-3\\0&0&0\end{pmatrix}}{\xrightarrow[{}]{(-1/3)\rho _{2}}}{\begin{pmatrix}1&2&1\\0&0&1\\0&0&0\end{pmatrix}}{\xrightarrow[{}]{-\rho _{2}+\rho _{1}}}{\begin{pmatrix}1&2&0\\0&0&1\\0&0&0\end{pmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0abe27d67c8beb79e1da4544e0b32614f3655bb8)






































