Perform, if possible, each matrix-vector multiplication.
Answer
Not defined.
This exercise is recommended for all readers.
Problem 3
Solve this matrix equation.
Answer
Matrix-vector multiplication gives rise to a linear system.
Gaussian reduction shows that , , and .
This exercise is recommended for all readers.
Problem 4
For a homomorphism from to that sends
where does go?
Answer
Here are two ways to get the answer.
First, obviously , and so we can
apply the general property of preservation of combinations to get
.
The other way uses the computation scheme developed in this subsection.
Because we know where these elements of the space go, we consider
this basis for the domain.
Arbitrarily, we can take
as a basis for the codomain.
With those choices, we have that
and, as
the matrix-vector multiplication calculation gives this.
Thus, , as above.
This exercise is recommended for all readers.
Problem 5
Assume that is determined by
this action.
Using the standard bases, find
the matrix representing this map;
a general formula for .
Answer
Again, as recalled in the subsection,
with respect to , a column vector represents itself.
To represent with respect
to we take
the images of the basis vectors from the domain,
and represent them with respect to the basis for the codomain.
These are adjoined to make the matrix.
For any in the domain ,
and so
is the desired representation.
This exercise is recommended for all readers.
Problem 6
Let be the derivative
transformation.
Represent with respect to where
.
Represent with respect to where
.
Answer
We must first find the image of each vector from the domain's basis,
and then represent that image with respect to the codomain's basis.
Those representations are then adjoined to make the matrix
representing the map.
Proceeding as in the prior item, we represent the images
of the domain's basis vectors
and adjoin to make the matrix.
This exercise is recommended for all readers.
Problem 7
Represent each linear map with respect to each pair of bases.
with respect to
where , given by
with respect to
where , given by
with respect to
where
and , given by
with respect to
where
and , given by
with respect
to where , given by
Answer
For each, we must find the image of each of the domain's basis vectors,
represent each image with respect to the codomain's basis,
and then adjoin those representations to get the matrix.
The basis vectors from the domain have these images
and these images are represented with respect to the codomain's
basis in this way.
The matrix
has rows and columns.
Once the images under this map of the domain's basis
vectors are determined
then they can be represented with respect to the codomain's basis
and put together to make the matrix.
The images of the basis vectors of the domain are
and they are represented with respect to the codomain's basis as
so the matrix is
(this is an matrix).
Here, the images of the domain's basis vectors are
and they are represented in the codomain as
and so the matrix is this.
The images of the basis vectors from the domain are
which are represented as
The resulting matrix
is Pascal's triangle
(recall that is the number of ways to choose
things, without order and without repetition,
from a set of size ).
Problem 8
Represent the identity map on any nontrivial
space with respect to , where is any basis.
Answer
Where the space is -dimensional,
is the identity matrix.
Problem 9
Represent, with respect to the natural basis,
the transpose transformation on the space
of matrices.
Answer
Taking this as the natural basis
the transpose map acts in this way
so that representing the images with respect to the codomain's
basis and adjoining those column vectors together gives this.
Problem 10
Assume that
is a basis for a vector space.
Represent with respect to the transformation that is determined
by each.
,
,
,
,
,
,
,
,
,
Answer
With respect to the basis of the codomain, the images of
the members of the basis of the domain are represented as
and consequently, the matrix representing the transformation is
this.
Problem 11
Example 1.8 shows how to represent
the rotation transformation of the plane with respect to the
standard basis.
Express these other transformations also with respect to the standard
basis.
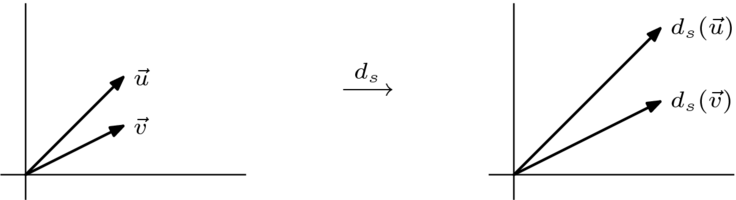
the dilation map , which multiplies
all vectors by the same scalar
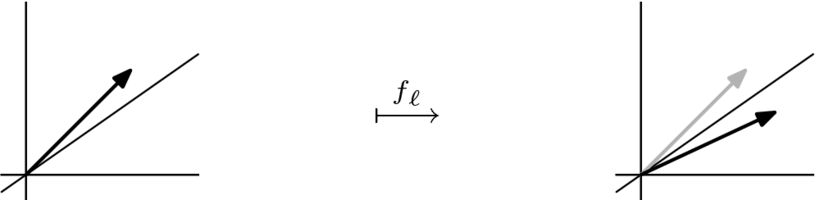
the reflection map , which reflects all
all vectors across a line through the origin
Answer
The picture of is this.
This map's effect on the vectors in the standard basis for the domain
is
and those images are represented with respect to the
codomain's basis (again, the standard basis) by themselves.
Thus the representation of the dilation map is this.
The picture of is this.
Some calculation (see Problem I.1.20)
shows that when the line has slope
(the case of a line with undefined slope is separate but easy)
and so the matrix representing reflection is this.
This exercise is recommended for all readers.
Problem 12
Consider a linear transformation of determined
by these two.
Represent this transformation with respect to the standard
bases.
Where does the transformation send this vector?
Represent this transformation with respect to these bases.
Using from the prior item,
represent the transformation with respect to .
Answer
Call the map .
To represent this map with respect to the standard bases, we
must find, and then represent, the images of the vectors
and from the domain's basis.
The image of is given.
One way to find the image of is by
eye— we can see this.
A more systematic way to find the image of is to
use the given information to represent the transformation, and then
use that representation to determine the image.
Taking this for a basis,
the given information says this.
As
we have that
and consequently we know that
(since, with respect to the standard basis, this vector is
represented by itself).
Therefore, this is the representation of with respect to
.
To use the matrix developed in the prior item, note that
and so we have this is the representation, with respect to the
codomain's basis, of the image of the given vector.
Because the codomain's basis is the standard one, and so vectors
in the codomain are represented by themselves, we have this.
We first find the image of each member of , and then
represent those images with respect to .
For the first step, we can use the matrix developed earlier.
Actually, for the second member of there is no need to apply the
matrix because the problem statement gives its image.
Now representing those images with respect to is routine.
Thus, the matrix is this.
We know the images of the members of the domain's basis
from the prior item.
We can compute the representation of those images with respect to
the codomain's basis.
Thus this is the matrix.
Problem 13
Suppose that is nonsingular so that
by Theorem II.2.21, for any basis
the image
is a basis for .
Represent the map with respect to .
For a member of the domain, where
the representation of has components , ..., ,
represent the image vector with respect to
the image basis .
Answer
The images of the members of the domain's basis are
and those images are represented with respect to the codomain's
basis in this way.
Hence, the matrix is the identity.
Using the matrix in the prior item,
the representation is this.
Problem 14
Give a formula for the product of a matrix and , the
column vector that is all zeroes except for a single one in the -th
position.
Answer
The product
gives the -th column of the matrix.
This exercise is recommended for all readers.
Problem 15
For each vector space of functions of one real variable,
represent the derivative transformation with respect to .
,
,
,
Answer
The images of the basis vectors for the domain are
and
.
Representing those with respect to the codomain's basis (again, )
and adjoining the representations gives this matrix.
The images of the vectors in the domain's basis are
and
.
Representing with respect to the codomain's basis and adjoining
gives this matrix.
The images of the members of the domain's basis are
,
,
, and
.
Representing these images with respect to and adjoining
gives this matrix.
Problem 16
Find the range of the linear transformation of represented
with respect to the standard bases by each matrix.
a matrix of the form
Answer
It is the set of vectors of the codomain represented with
respect to the codomain's basis in this way.
As the codomain's basis is ,
and so each vector is represented
by itself, the range of this transformation is the -axis.
It is the set of vectors of the codomain represented
in this way.
With respect to vectors represent
themselves so this range
is the axis.
The set of vectors represented with
respect to as
is the line , provided either or is not zero, and
is the set consisting of just the origin if both are zero.
This exercise is recommended for all readers.
Problem 17
Can one matrix represent two different linear maps?
That is, can ?
Answer
Yes, for two reasons.
First, the two maps and need not have the same domain
and codomain.
For instance,
represents a map with respect to the standard
bases that sends
and also represents a
with respect to
and that acts in this way.
The second reason is that, even if the domain and
codomain of and coincide, different bases produce
different maps.
An example is the identity matrix
which represents the identity map on with respect to
.
However, with respect to for the domain but the basis
for the codomain,
the same matrix represents the map that swaps the first and second
components
We mimic Example 1.1, just replacing the
numbers with letters.
Write as
and as .
By definition of representation of a map with respect to bases,
the assumption that
means that
.
And, by the definition of the representation of a vector with respect to
a basis, the assumption that
means that .
Substituting gives
and so is represented as required.
This exercise is recommended for all readers.
Problem 19
Example 1.8 shows how to represent
rotation of all vectors in the plane through an angle
about the origin,
with respect to the standard bases.
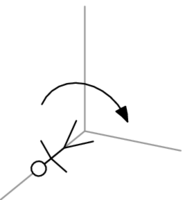
Rotation of all vectors in three-space through an angle
about the -axis is a transformation of .
Represent it with respect to the standard bases.
Arrange the rotation so that
to someone whose feet are at the origin and
whose head is at , the movement appears clockwise.
Repeat the prior item, only rotate about the -axis
instead.
(Put the person's head at .)
Repeat, about the -axis.
Extend the prior item to .
(Hint:
"rotate about the -axis" can be restated as "rotate parallel
to the -plane".)
Answer
The picture is this.
The images of the vectors from the domain's basis
are represented with respect to the codomain's basis
(again, ) by themselves,
so adjoining the representations to
make the matrix gives this.
The picture is similar to the one in the prior answer.
The images of the vectors from the domain's basis
are represented with respect to the codomain's basis
by themselves, so this is the matrix.
To a person standing up, with the vertical -axis,
a rotation of the -plane that is clockwise proceeds from
the positive -axis to the positive -axis.
That is, it rotates opposite to the direction in
Example 1.8.
The images of the vectors from the domain's basis
are represented with respect to
by themselves, so the matrix is this.
Problem 20 (Schur's Triangularization Lemma)
Let be a subspace of and fix bases
.
What is the relationship between the representation of a vector
from with
respect to and the representation of that vector
(viewed as a member of ) with
respect to ?
What about maps?
Fix a basis
for and observe that the spans
form a strictly increasing chain of subspaces.
Show that for any linear map there is a chain
of
subspaces of such that
for each .
Conclude that for every linear map
there are
bases so the matrix representing with respect to
is upper-triangular
(that is, each entry with is zero).
Is an upper-triangular representation unique?
Answer
Write as
and
then as .
If
then,
because .
We must first decide what the question means.
Compare with its restriction to the subspace
.
The rangespace of the restriction is a subspace of , so fix a
basis for this rangespace and extend it to a basis
for .
We want the relationship between these two.
The answer falls right out of the prior item: if
then the extension is represented in this way.
Take to be the span of
.
Apply the answer from the second item to the third item.
No.
For instance , projection onto
the axis, is represented by these two upper-triangular
matrices




































































































































































































































![{\displaystyle [\{{\vec {0}}\}]=\{{\vec {0}}\}\subset [\{{\vec {\beta }}_{1}\}]\subset [\{{\vec {\beta }}_{1},{\vec {\beta }}_{2}\}]\subset \quad \cdots \quad \subset [B]=V}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3414ca6462a266e81a770fece4e99534b9ae335d)

![{\displaystyle h([\{{\vec {\beta }}_{1},\dots ,{\vec {\beta }}_{i}\}])\subset W_{i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8a96d738e2b917d08ef2413bf0cccf59449c4022)

















