It is one-to-one because if sends two members of the domain to the same image, that is, if , then the definition of gives that
and since column vectors are equal only if they have equal components, we have that and that . Thus, if maps two row vectors from the domain to the same column vector then the two row vectors are equal: .
To show that is onto we must show that any member of the codomain is the image under of some row vector. That's easy;
is .
The computation for preservation of addition is this.
The computation for preservation of scalar multiplication is similar.
Denote the map from Example 1.2 by . To show that it is one-to-one, assume that . Then by the definition of the function,
and so and and . Thus , and consequently is one-to-one.
The function is onto because there is a polynomial sent to
by , namely, .
As for structure, this shows that preserves addition
and this shows
that it preserves scalar multiplication.
This exercise is recommended for all readers.
Problem 2
For the map given by
Find the image of each of these elements of the domain.
Show that this map is an isomorphism.
Answer
These are the images.
To prove that is one-to-one, assume that it maps two linear polynomials to the same image . Then
and so, since column vectors are equal only when their components are equal, and . That shows that the two linear polynomials are equal, and so is one-to-one.
To show that is onto, note that this member of the codomain
is the image of this member of the domain .
To check that preserves structure, we can use item 2 of Lemma 1.9.
Problem 3
Show that the natural map from
Example 1.5
is an isomorphism.
Answer
To verify it is one-to-one, assume that . Then by the definition of . Members of are equal only when they have the same coefficients, so this implies that and and . Therefore implies that , and so is one-to-one.
To verify that it is onto, consider an arbitrary member of the codomain and observe that it is indeed the image of a member of the domain, namely, it is .
(For instance, .)
The computation checking that preserves addition is this.
The check that preserves scalar multiplication is this.
This exercise is recommended for all readers.
Problem 4
Decide whether each map is an isomorphism (if it is an isomorphism then prove it and if it isn't then state a condition that it fails to satisfy).
given by
given by
given by
given by
Answer
No; this map is not one-to-one. In particular, the matrix of all zeroes is mapped to the same image as the matrix of all ones.
Yes, this is an isomorphism.
It is one-to-one:
gives that , and that , and that , and that .
It is onto, since this shows
that any four-tall vector is the image of a matrix.
Finally, it preserves combinations
and so item 2 of Lemma 1.9 shows that it preserves structure.
Yes, it is an isomorphism.
To show that it is one-to-one, we suppose that two members of the domain have the same image under .
This gives, by the definition of , that and then the fact that polynomials are equal only when their coefficients are equal gives a set of linear equations
that has only the solution , , , and .
To show that is onto, we note that is the image under of this matrix.
We can check that preserves structure by using item 2 of Lemma 1.9.
No, this map does not preserve structure. For instance, it does not send the zero matrix to the zero polynomial.
Problem 5
Show that the map given by is one-to-one and onto.Is it an isomorphism?
Answer
It is one-to-one and onto, a correspondence, because it has an inverse (namely, ). However, it is not an isomorphism. For instance, .
This exercise is recommended for all readers.
Problem 6
Refer to Example 1.1. Produce two more isomorphisms (of course, that they satisfy the conditions in the definition of isomorphism must be verified).
Answer
Many maps are possible. Here are two.
The verifications are straightforward adaptations of the others above.
Problem 7
Refer to Example 1.2. Produce two more isomorphisms (and verify that they satisfy the conditions).
Answer
Here are two.
Verification is straightforward (for the second, to show that it is onto, note that
is the image of ).
This exercise is recommended for all readers.
Problem 8
Show that, although is not itself a subspace of , it is isomorphic to the -plane subspace of .
Answer
The space is not a subspace of because it is not a subset of . The two-tall vectors in are not members of .
The natural isomorphism (called the injection map) is this.
This map is one-to-one because
which in turn implies that and , and therefore
the initial two two-tall vectors are equal.
Because
this map is onto the -plane.
To show that this map preserves structure, we will use item 2 of Lemma 1.9 and show
that it preserves combinations of two vectors.
Problem 9
Find two isomorphisms between and .
Answer
Here are two:
Verification that each is an isomorphism is easy.
This exercise is recommended for all readers.
Problem 10
For what is isomorphic to ?
Answer
When is the product , here is an isomorphism.
Checking that this is an isomorphism is easy.
Problem 11
For what is isomorphic to ?
Answer
If then . (If we take and to be trivial vector spaces, then the relationship extends one dimension lower.) The natural isomorphism between them is this.
Checking that it is an isomorphism is straightforward.
Problem 12
Prove that the map in Example 1.7, from to given by , is a vector space isomorphism.
Answer
This is the map, expanded.
To finish checking that it is an isomorphism, we apply item 2 of Lemma 1.9 and show that it preserves linear combinations of two polynomials. Briefly, the check goes like this.
Problem 13
Why, in Lemma 1.8, must there be a ? That is, why must be nonempty?
Answer
No vector space has the empty set underlying it. We can take to be the zero vector.
Problem 14
Are any two trivial spaces isomorphic?
Answer
Yes; where the two spaces are and , the map sending to is clearly one-to-one and onto, and also preserves what little structure there is.
Problem 15
In the proof of Lemma 1.9, what about the zero-summands case (that is, if is zero)?
Answer
A linear combination of vectors adds to the zero vector and so Lemma 1.8 shows that the three statements are equivalent in this case.
Problem 16
Show that any isomorphism has the form for some nonzero real number .
Answer
Consider the basis for and let be . For any we have that and so 's action is multiplication by . Note that or else the map is not one-to-one. (Incidentally, any such map is an isomorphism,
as is easy to check.)
This exercise is recommended for all readers.
Problem 17
These prove that isomorphism is an equivalence relation.
Show that the identity map is an isomorphism. Thus, any vector space is isomorphic to itself.
Show that if is an isomorphism then so is its inverse . Thus, if is isomorphic to then also is isomorphic to .
Show that a composition of isomorphisms is an isomorphism: if is an isomorphism and is an isomorphism then so also is . Thus, if is isomorphic to and is isomorphic to , then also is isomorphic to .
Answer
In each item, following item 2 of Lemma 1.9, we show that the map preserves
structure by showing that the it preserves linear combinations of two members of the domain.
The identity map is clearly one-to-one and onto. For linear combinations the check is easy.
The inverse of a correspondence is also a correspondence (as stated in the appendix), so we need only check that the inverse preserves linear combinations. Assume that (so ) and assume that .
The composition of two correspondences is a correspondence (as stated in the appendix), so we need only check that the composition map preserves linear combinations.
Problem 18
Suppose that preserves structure. Show that is one-to-one if and only if the unique member of mapped by to is .
Answer
One direction is easy: by definition, if is one-to-one then for any at most one has , and so in particular, at most one member of is mapped to . The proof of Lemma 1.8 does not use the fact that the map is a correspondence and therefore shows that any structure-preserving map sends to .
For the other direction, assume that the only member of that is mapped to is . To show that is one-to-one assume that . Then and so . Consequently , so , and so is one-to-one.
Problem 19
Suppose that is an isomorphism. Prove that the set is linearly dependent if and only if the set of images is linearly dependent.
Answer
We will prove something stronger— not only is the existence of a dependence preserved by isomorphism, but each instance of a dependence is preserved, that is,
The direction of this statement holds by item 3 of Lemma 1.9. The direction holds by regrouping
and applying the fact that is one-to-one, and so for the two vectors and to be mapped to the same image by , they must be equal.
This exercise is recommended for all readers.
Problem 20
Show that each type of map from Example 1.6 is an automorphism.
Dilation by a nonzero scalar .
Rotation through an angle .
Reflection over a line through the origin.
Hint.
For the second and third items, polar coordinates are useful.
Answer
This map is one-to-one because if then by definition of the map, and so , as is nonzero. This map is onto as any is the image of (again, note that is nonzero). (Another way to see that this map is a correspondence is to observe that it has an inverse: the inverse of is .)
To finish, note that this map preserves linear combinations
and therefore is an isomorphism.
As in the prior item, we can show that the map is a correspondence by noting that it has an inverse, .
That the map preserves structure is geometrically easy to see. For instance, adding two vectors and then rotating them has the same effect as rotating first and then adding. For an algebraic argument, consider polar coordinates: the map sends the vector with endpoint to the vector with endpoint . Then the familiar trigonometric formulas and show how to express the map's action in the usual rectangular coordinate system.
Now the calculation for preservation of addition
is routine.
The calculation for preservation of scalar multiplication is similar.
This map is a correspondence because it has an inverse (namely, itself).
As in the last item, that the reflection map preserves structure is geometrically easy to see: adding vectors and then reflecting gives the same result as reflecting first and then adding, for instance. For an algebraic proof, suppose that the line has slope (the case of a line with undefined slope can be done as a separate, but easy, case). We can follow the hint and use polar coordinates: where the line forms an angle of with the -axis, the action of is to send the vector with endpoint to the one with endpoint .
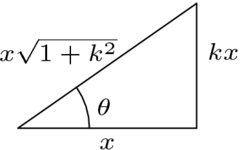
To convert to rectangular coordinates, we will use some trigonometric formulas, as we did in the prior item. First observe that and can be determined from the slope of the line. This picture
gives that and . Now,
and thus the first component of the image vector is this.
A similar calculation shows that the second component of the image
vector is this.
With this algebraic description of the action of
checking that it preserves structure is routine.
Problem 21
Produce an automorphism of other than the identity map, and other than a shift map .
Answer
First, the map doesn't count because it is a version of . Here is a correct answer (many others are also correct): . Verification that this is an isomorphism is straightforward.
Problem 22
Show that a function is an automorphism if and only if it has the form for some .
Let be an automorphism of such that . Find .
Show that a function is an automorphism if and only if it has the form
for some with . Hint. Exercises in prior subsections have shown that
if and only if .
Let be an automorphism of with
Find
Answer
For the "only if" half, let to be an isomorphism. Consider the basis . Designate by . Then for any we have that , and so 's action is multiplication by . To finish this half, just note that or else would not be one-to-one.
For the "if" half we only have to check that such a map is an isomorphism when . To check that it is one-to-one, assume that so that and divide by the nonzero factor to conclude that . To check that it is onto, note that any is the image of (again, ). Finally, to check that such a map preserves combinations of two members of the domain, we have this.
By the prior item, 's action is . Thus .
For the "only if" half, assume that is an automorphism. Consider the standard basis for . Let
Then the action of on any vector is determined by by its action on the two basis vectors.
To finish this half, note that if , that is, if is a multiple of , then is not one-to-one.
For "if" we must check that the map is an isomorphism, under the condition that . The structure-preservation check is easy; we will here show that is a correspondence. For the argument that the map is one-to-one, assume this.
Then, because , the resulting system
has a unique solution, namely the trivial one
and
(this follows from the hint).
The argument that this map is onto is closely related— this system
has a solution for any and if and only if
this set
spans , i.e., if and only if this set is
a basis (because it is a two-element subset of ),
i.e., if and only if .
Problem 23
Refer to Lemma 1.8 and Lemma 1.9. Find two more things preserved by isomorphism.
Answer
There are many answers; two are linear independence and subspaces.
To show that if a set is linearly independent then its image is also linearly independent, consider a linear relationship among members of the image set.
Because this map is an isomorphism, it is one-to-one. So maps only one vector from the domain to the zero vector in the range, that is, equals the zero vector (in the domain, of course). But, if is linearly independent then all of the 's are zero, and so is linearly independent also. (Remark. There is a small point about this argument that is worth mention. In a set, repeats collapse, that is, strictly speaking, this is a one-element set: , because the things listed as in it are the same thing. Observe, however, the use of the subscript in the above argument. In moving from the domain set to the image set , there is no collapsing, because the image set does not have repeats, because the isomorphism is one-to-one.)
To show that if is an isomorphism and if is a subspace of the domain then the set of image vectors is a subspace of , we need only show that it is closed under linear combinations of two of its members (it is nonempty because it contains the image of the zero vector). We have
and is a member of because of the closure of a subspace under combinations. Hence the combination of and is a member of .
Problem 24
We show that isomorphisms can be tailored to fit in that, sometimes, given vectors in the domain and in the range we can produce an isomorphism associating those vectors.
Let be a basis for so that any has a unique representation as , which we denote in this way.
Show that the operation is a function from to (this entails showing that with every domain vector there is an associated image vector in , and further, that with every domain vector there is at most one associated image vector).
Show that this function is one-to-one and onto.
Show that it preserves structure.
Produce an isomorphism from to
that fits these specifications.
Answer
The association
is a function if every member of the domain is associated with at least one member of the codomain, and if every member of the domain is associated with at most one member of the codomain. The first condition holds because the basis spans the domain— every can be written as at least one linear combination of 's. The second condition holds because the basis is linearly independent— every member of the domain can be written as at most one linear combination of the 's.
For the one-to-one argument, if , that is, if then
and so and and , which gives the conclusion that . Therefore this map is one-to-one.
For onto, we can just note that
equals , and so any member of the codomain is the image of some member of the domain .
This map respects addition and scalar multiplication because it respects combinations of two members of the domain (that is, we are using item 2 of Lemma 1.9): where and , we have this.
Use any basis for whose first two members are and , say .
Problem 25
Prove that a space is -dimensional if and only if it is isomorphic to . Hint. Fix a basis for the space and consider the map sending a vector over to its representation with respect to .
Answer
See the next subsection.
Problem 26
(Requires the subsection on Combining Subspaces, which is optional.) Let and be vector spaces. Define a new vector space, consisting of the set along with these operations.
This is a vector space, the external direct sum of and .
Check that it is a vector space.
Find a basis for, and the dimension of, the external direct sum .
What is the relationship among , , and ?
Suppose that and are subspaces of a vector space such that (in this case we say that is the internal direct sum of and ). Show that the map given by
is an isomorphism. Thus if the internal direct sum is defined then the internal and external direct sums are isomorphic.
Answer
Most of the conditions in the definition of a vector space are routine. We here sketch the verification of part 1 of that definition.
For closure of , note that because and are closed, we have that and and so . Commutativity of addition in follows from commutativity of addition in and .
The check for associativity of addition is similar. The zero element is and the additive inverse of is .
The checks for the second part of the definition of a vector space are also straightforward.
This is a basis
because there is one and only one way to represent any member of with respect to this set; here is an example.
The dimension of this space is five.
We have as this is a basis.
We know that if then each can be written as in one and only one way. This is just what we need to prove that the given function an isomorphism.
First, to show that is one-to-one we can show that if , that is, if then and . But the statement "each is such a sum in only one way" is exactly what is needed to make this conclusion. Similarly, the argument that is onto is completed by the statement that "each is such a sum in at least one way".
This map also preserves linear combinations







































































![{\displaystyle f^{-1}(x)={\sqrt[{3}]{x}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c7c3ee50a06fa60166baec42d9c2200474fbf2a1)